
製品カテゴリ
商品のタグ
FMUSERサイト
- es.fmuser.net
- it.fmuser.net
- fr.fmuser.net
- de.fmuser.net
- af.fmuser.net ->アフリカーンス語
- sq.fmuser.net ->アルバニア語
- ar.fmuser.net ->アラビア語
- hy.fmuser.net ->アルメニア語
- az.fmuser.net ->アゼルバイジャン
- eu.fmuser.net ->バスク
- be.fmuser.net ->ベラルーシ語
- bg.fmuser.net ->ブルガリア語
- ca.fmuser.net ->カタロニア語
- zh-CN.fmuser.net ->中国語(簡体字)
- zh-TW.fmuser.net ->中国語(繁体字)
- hr.fmuser.net ->クロアチア語
- cs.fmuser.net ->チェコ
- da.fmuser.net ->デンマーク語
- nl.fmuser.net ->オランダ語
- et.fmuser.net ->エストニア語
- tl.fmuser.net ->フィリピン人
- fi.fmuser.net ->フィンランド語
- fr.fmuser.net ->フランス語
- gl.fmuser.net ->ガリシア語
- ka.fmuser.net ->グルジア語
- de.fmuser.net ->ドイツ語
- el.fmuser.net ->ギリシャ語
- ht.fmuser.net ->ハイチクレオール
- iw.fmuser.net ->ヘブライ語
- hi.fmuser.net ->ヒンディー語
- hu.fmuser.net ->ハンガリー語
- is.fmuser.net ->アイスランド語
- id.fmuser.net ->インドネシア語
- ga.fmuser.net ->アイルランド
- it.fmuser.net ->イタリア語
- ja.fmuser.net ->日本語
- ko.fmuser.net ->韓国語
- lv.fmuser.net ->ラトビア語
- lt.fmuser.net ->リトアニア語
- mk.fmuser.net ->マケドニア語
- ms.fmuser.net ->マレー語
- mt.fmuser.net ->マルタ語
- no.fmuser.net ->ノルウェー語
- fa.fmuser.net ->ペルシア語
- pl.fmuser.net ->ポーランド語
- pt.fmuser.net ->ポルトガル語
- ro.fmuser.net ->ルーマニア語
- ru.fmuser.net ->ロシア語
- sr.fmuser.net ->セルビア語
- sk.fmuser.net ->スロバキア
- sl.fmuser.net ->スロベニア語
- es.fmuser.net ->スペイン語
- sw.fmuser.net ->スワヒリ語
- sv.fmuser.net ->スウェーデン語
- th.fmuser.net ->タイ
- tr.fmuser.net ->トルコ語
- uk.fmuser.net ->ウクライナ語
- ur.fmuser.net ->ウルドゥー語
- vi.fmuser.net ->ベトナム人
- cy.fmuser.net ->ウェールズ
- yi.fmuser.net ->イディッシュ語
デジタル位相変調を復調する方法
無線周波数復調
位相シフトキーイング波形から元のデジタルデータを抽出する方法について説明します。
前のXNUMXページでは、(デジタル化されていない)オーディオなどのアナログデータを伝送するAMおよびFM信号の復調を実行するシステムについて説明しました。 これで、XNUMX番目の一般的なタイプの変調、つまり位相変調を介してエンコードされた元の情報を復元する方法を確認する準備ができました。
ただし、アナログ位相変調は一般的ではありませんが、デジタル位相変調は非常に一般的です。 したがって、デジタルRF通信のコンテキストでPM復調を調査する方が理にかなっています。 バイナリ位相シフトキーイング(BPSK)を使用してこのトピックを探索します。 ただし、直角位相シフトキーイング(QPSK)は、最新のワイヤレスシステムにより適していることに注意してください。
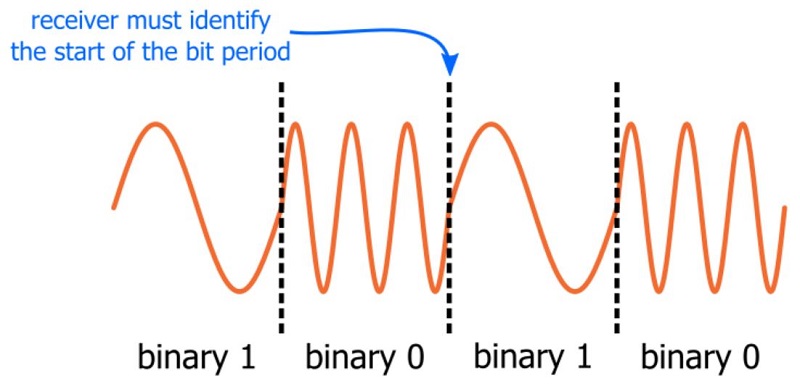
名前が示すように、バイナリフェーズシフトキーイングは、0つのフェーズをバイナリ1に割り当て、別のフェーズをバイナリ180に割り当てることでデジタルデータを表します。XNUMXつのフェーズはXNUMX°離れており、復調精度を最適化しています。シンボルをデコードします。
乗算と統合—そして同期
BPSK復調器は、乗算器と積分器のXNUMXつの機能ブロックで主に構成されています。 これらのXNUMXつのコンポーネントは、元のバイナリデータに対応する信号を生成します。 ただし、レシーバはビット周期間の境界を識別できる必要があるため、同期回路も必要です。 これは、アナログ復調とデジタル復調の重要な違いなので、詳しく見ていきましょう。
アナログ復調では、信号に実際の始まりや終わりはありません。 オーディオ信号、つまり音楽に応じて連続的に変化する信号を放送しているFMトランスミッターを想像してください。 ここで、最初はオフになっているFMレシーバーを想像してください。
ユーザーはいつでもレシーバーの電源を入れることができ、復調回路は変調されたキャリアからオーディオ信号の抽出を開始します。 抽出された信号は増幅してスピーカーに送信でき、音楽は正常に聞こえます。
オーディオ信号が曲の最初と最後のどちらを表しているのか、または復調回路が小節の最初、またはビートの直後、またはXNUMXつのビートの間に機能し始めているのかは、レシーバーにはわかりません。 それは問題ではありません。 各瞬時電圧値はオーディオ信号のXNUMXつの正確な瞬間に対応し、これらの瞬時値のすべてが連続して発生すると、音が再現されます。
デジタル変調では、状況はまったく異なります。 ここでは、瞬間的な振幅ではなく、XNUMXつの離散的な情報、つまり数値(XNUMXまたはXNUMX)を表す一連の振幅を扱います。
振幅の各シーケンス(シンボルと呼ばれ、期間がXNUMXビット周期に等しい)は、前後のシーケンスと区別する必要があります:(上記の例の)放送局がデジタル変調を使用していて、受信機の電源が入り、復調が開始された場合ランダムな時点で、何が起こりますか?
さて、もし受信機がたまたまシンボルの真ん中で復調を始めたら、それは一つのシンボルの半分と次のシンボルの半分を解釈しようとするでしょう。 もちろん、これはエラーにつながります。 論理XNUMXの記号の後に論理XNUMXの記号が続くと、XNUMXまたはXNUMXとして解釈される可能性が等しくなります。
明らかに、デジタルRFシステムでは同期が優先事項である必要があります。 同期への簡単なアプローチのXNUMXつは、各パケットの前に、ゼロシンボルとXNUMXつのシンボルを交互に含む(上記の図のように)定義済みの「トレーニングシーケンス」を付けることです。 受信機は、これらのXNUMXゼロXNUMXゼロ遷移を使用してシンボル間の時間境界を識別できます。その後、システムの事前定義されたシンボル期間を適用するだけで、パケット内の残りのシンボルを適切に解釈できます。
乗算の効果
上記のように、PSK復調の基本的なステップは乗算です。 より具体的には、着信BPSK信号に、搬送周波数と等しい周波数の基準信号を乗算します。 これは何を達成しますか? 数学を見てみましょう。 最初に、製品はXNUMXつの正弦関数を識別します。
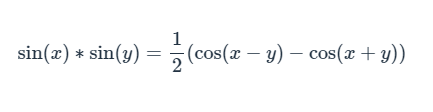
これらの一般的な正弦関数を周波数と位相を持つ信号に変換すると、次のようになります。

単純化すると、次のようになります。

オフセットが重要です。受信信号の位相が参照信号の位相と等しい場合、cos(0°)は1になります。受信信号の位相が180°の位相と異なる場合基準信号であるcos(180°)は–1です。 したがって、乗算器の出力には、バイナリ値のXNUMXつに対して正のDCオフセットがあり、他のバイナリ値に対して負のDCオフセットがあります。 このオフセットは、各シンボルをXNUMXまたはXNUMXとして解釈するために使用できます。
シミュレーションの確認
次のBPSK変復調回路は、LTspiceでBPSK信号を作成する方法を示しています。
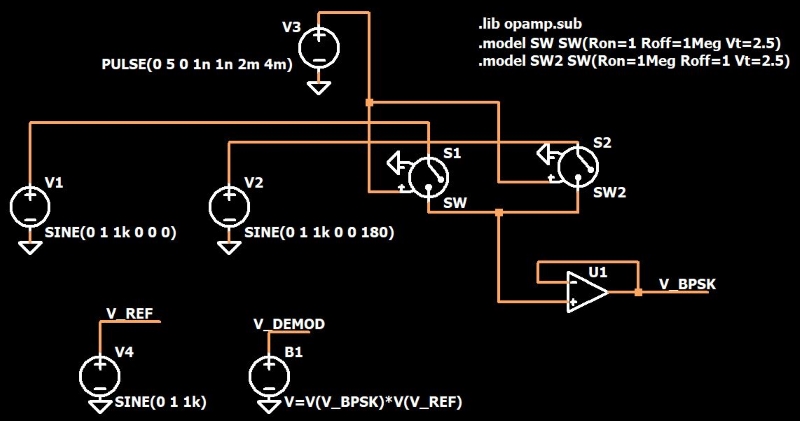
0つの正弦波ソース(180つは位相= XNUMX°、もうXNUMXつは位相= XNUMX°)は、XNUMXつの電圧制御スイッチに接続されます。 両方のスイッチは同じ方形波の制御信号を持ち、オン抵抗とオフ抵抗は、一方が開いているときにもう一方が閉じているように構成されています。 XNUMXつのスイッチの「出力」端子は相互に接続されており、オペアンプは次のような結果の信号をバッファリングします。
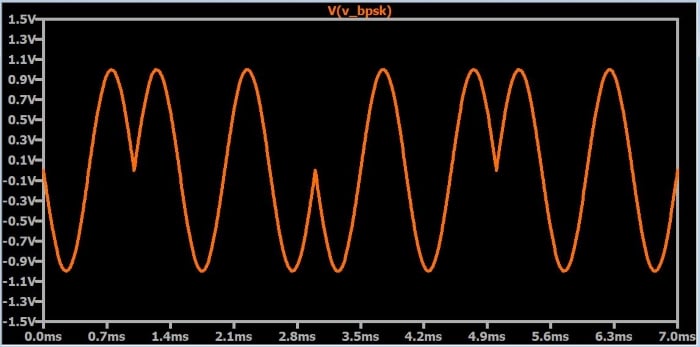
次に、BPSK波形の周波数と等しい周波数の基準正弦波(V4)があり、任意の動作電圧源を使用して、BPSK信号に基準信号を乗算します。 結果は次のとおりです。
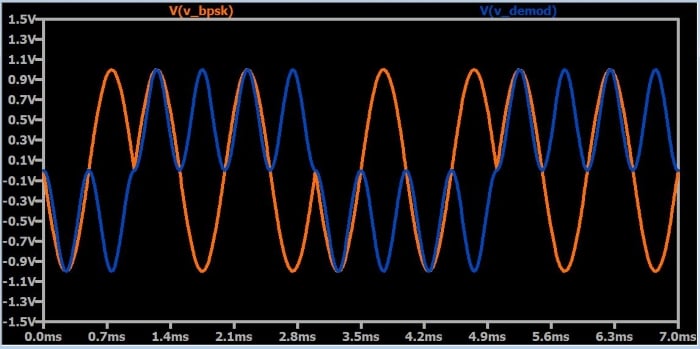
ご覧のとおり、復調された信号は受信信号の周波数のXNUMX倍であり、各シンボルの位相に応じて正または負のDCオフセットがあります。 次に、この信号を各ビット周期に関して積分すると、元のデータに対応するデジタル信号が得られます。
コヒーレント検出
この例では、受信機の基準信号の位相は、着信変調信号の位相と同期しています。 これはシミュレーションで簡単に実行できます。 現実の世界では、それはかなり困難です。 さらに、このページの「差分エンコーディング」で説明したように、通常の位相シフトキーイングは、送信機と受信機の間で予測できない位相差の影響を受けるシステムでは使用できません。
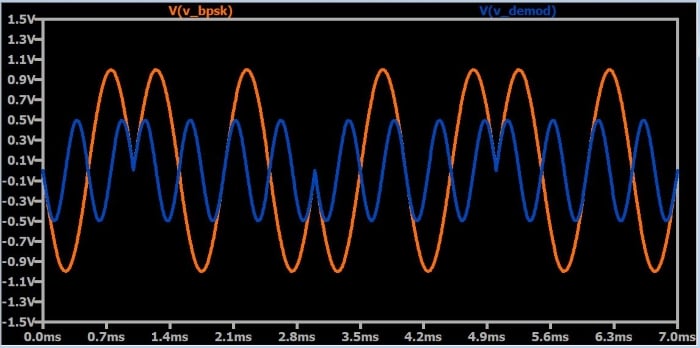
たとえば、レシーバーの基準信号がトランスミッターの搬送波と90°位相がずれている場合、基準とBPSK信号間の位相差は常に90°であり、cos(90°)は0です。したがって、DCオフセットは失われ、システムは完全に機能しなくなります。
これは、V4ソースの位相を90°に変更することで確認できます。 これが結果です:
まとめ
*デジタル復調にはビット周期の同期が必要です。 受信機は、隣接するシンボル間の境界を識別できなければなりません。
*バイナリ位相シフトキーイング信号は、乗算とそれに続く積分によって復調できます。 乗算ステップで使用される基準信号は、送信機の搬送波と同じ周波数を持っています。
*通常の位相シフトキーイングは、受信機の基準信号の位相が送信機の搬送波の位相との同期を維持できる場合にのみ信頼できます。
